ЦРС§Йъ»ъЖчИЛЧгЗт»о¶ҜІЯВФМҪЛчЈЁЙПЈ©
ұҫОДЧӘФШЧФЎ¶ЦР№ъҝЖјјҪМУэЎ·ФУЦҫ2012.10ЧЬөЪ199ЖЪ
ЎЎЎЎЧгЗтФЛ¶ҜКЗТ»ЦЦҙујТ·ЗіЈПІ°®өДФЛ¶ҜЎЈИГ»ъЖчИЛИҘМЯЧгЗтЈ¬МэЖрАҙПсМм·ҪТ№М·ЛЖөДЎЈ»ъЖчИЛТІДЬИҘМЯЧгЗт? ¶шЗТЈ¬»№ТӘЧйіЙТ»ёц¶УОйЈ¬І»Н¬өД»ъЖчИЛТӘ»ҘПаЕдәПЈҝЧгЗт»ъЖчИЛТӘІОјУұИИьКЗ·сУРЧФјәөДСЫҫҰЎўЧФјәөДЛ«НИЎўЧФјәөДҙуДФЎўУРЧФјәөДЧмЈҝұҫОДКФНјНЁ№эЧгЗт»ъЖчИЛұИИьөДХыёцЧјұё№эіМөДГиКцАҙҪвҙрХвР©ОКМвЎЈ
ЎЎЎЎ»ъЖчИЛЧгЗтұИИьКЗИ«№ъЦРРЎС§Йъ»ъЖчИЛҙуИьЦРөДТ»ёцПоДҝЈ¬ДҝЗ°ЦчТӘУРҝЖРӯ»ъЖчИЛЧгЗтұИИьәНөзҪМ№Э»ъЖчИЛЧгЗтұИИьЎЈ»ъЖчИЛЧгЗтЧчОӘ¶аЦЦёЯРВјјКхјҜіЙөДІъОп,Т»·ҪГжҝЙОӘҝӘХ№ЦоИз¶аЦЗДЬМеПөНіРӯөчУләПЧчОКМвСРҫҝМṩһёцҪПАнПлөДКөСйЖҪМЁЈ¬БнТ»·ҪГжТтЖд¶Фҝ№РФәНІ©ЮДРФЈ¬ТСіЙОӘТ»ЦЦРВРНЎўёЯИӨО¶РФЎўёЯЦЗБҰұИИьПоДҝЎЈЧгЗт»ъЖчИЛҙҰУЪТ»ёцКөКұРФәЬЗҝөД¶ҜМ¬»·ҫіЦРЈ¬ОӘБЛіцЙ«өШНкіЙұИИьИООсЈ¬І»ҪцТӘЗу»ъЖчИЛҫЯУРБјәГөД¶ҜБҰС§МШРФЈ¬»№ТӘЗу»ъЖчИЛҫЯУРәНИЛАаЗтФұТ»СщөДЕМЗтәНМЯЗтөИДЬБҰЎЈФЪҙЛЈ¬ОТГЗ¶ФИзәОҝӘХ№ЧгЗт»ъЖчИЛ»о¶ҜЧчТ»ёціхІҪМҪЛчЎЈ
ИьЗ°СЎ°ОУлЗ°ЖЪСөБ·
ЎЎЎЎФЪЧгЗтұИИьЦРІОИь¶УФұөДЧФЙнЛШЦК·ЗіЈЦШТӘЈ¬ЦчТӘ°ьАЁЗ°ЖЪЧјұё№эіМЦРөД¶ҜКЦДЬБҰәНұаіМДЬБҰТФј°ұИИь№эіМЦРІОИь¶УФұөДРДАнЛШЦКәНБЩіЎУҰұдДЬБҰЈ¬ХвР©ЦұҪУҫц¶ЁБЛұИИьДЬІ»ДЬИЎөГҪПәГөДіЙјЁЈ¬ТтҙЛТ»¶ЁТӘСЎәГІОИь¶УФұЎЈФЪСЎФсИЛФұКұТӘЧўТвХвјёёцФӯФтЎЈөЪТ»Ј¬Т»¶ЁТӘСЎФс¶ФёГПоДҝУРЕЁәсРЛИӨөДС§ЙъЎЈөЪ¶юЈ¬Т»¶ЁТӘСЎФсАнҝЖіЙјЁМШұрКЗКэС§әНОпАніЙјЁұИҪПәГөДС§ЙъЈЁ»ъЖчИЛЧјұё№эіМЦРРиТӘҙуБҝұаРҙәНёьёДіМРтЈ©ЎЈөЪИэЈ¬Т»¶ЁТӘКЗПІ»¶¶ҜКЦЎўЙЖУЪУлИЛРӯЧчәН№өНЁІўЗТПІ»¶јЖЛг»ъС§ҝЖөДС§ЙъЎЈФЪОТРЈКЗҙУІОјУИ«№ъЦРРЎС§ЙъРЕПўС§°ВИьөДС§ЙъЦРСЎФсЈ¬ТтОӘХвЩѧЙъУРұаРҙіМРтөД»щҙЎЈ¬ФЪЕаСө№эіМЦРЛыГЗДЬ№»әЬҝмөШЙПКЦЈ¬ҝЙТФәЬИЭТЧөШҝҙ¶®іМРтІў¶ФЖдҪшРРРЮёДЎЈ
ЎЎЎЎИзҪсөД»ъЖчИЛұаіМ»щұҫУРБҪЦЦ·ҪКҪЈ¬Т»ЦЦКЗҙъВлКөПЦөДұаіМЈ¬Т»ЦЦКЗНјРО»ҜөДұаіМЎЈБҪЦЦУпСФёчУРёчөДМШөгЈ¬З°ХЯұаіМБй»оЈ¬»ъЖчҙҰАнЛЩ¶ИҪПәуХЯҝмЈ¬ө«КЗұаіМҪб№№ұИҪПёҙФУЈ¬ДС¶ИұИҪПҙуЈ¬І»ТЧУЪКөПЦЈ»¶шәуХЯҪб№№јтөҘЈ¬Т»ДҝБЛИ»Ј¬КөПЦЖрАҙұИҪПИЭТЧЈ¬С§ЙъТЧУЪЙПКЦЈ¬ө«КЗ»ъЖчҙҰАнЛЩ¶ИҪПВэЎЈТтҙЛФЪ¶ФУЪЛЩ¶ИТӘЗуІ»КЗәЬёЯөД»ъЖчИЛұИИьЦРЈ¬СЎФсНјРО»ҜұаіМЈ»ФЪ¶ФУЪЛЩ¶ИТӘЗуұИҪПёЯөДұИИьЦРЈ¬»№КЗУҰёГСЎФсҙъВлұаіМЎЈұҫРЈІОјУөДЧгЗт»ъЖчИЛұИИьЈ¬ТӘЗу»ъЖчИЛФЪИьіЎЙПөДЛЩ¶ИәНБйГф¶И¶јұИҪПёЯЈ¬ЛщТФОТГЗСЎФсөДКЗCУпСФҙъВлұаіМЎЈ
ЎЎЎЎФЪСЎФсәГС§ЙъЦ®ә󣬻№ТӘ¶ФС§ЙъҪшРРіМРт»щҙЎЦӘК¶әН»ъЖчИЛ»щұҫАнВЫөДЕаСөЈ¬°ьАЁCУпСФіМРтөДИэҙу»щұҫҪб№№өДС§П°Ј¬ЦчТӘКЗЛіРтҪб№№ЎўСӯ»·Ҫб№№ЎўСЎФсУпҫдТФј°CУпСФәҜКэөДС§П°әНБ·П°ЎЈЧгЗт»ъЖчИЛіМРтЙијЖЦчТӘФЛУГifСЎФсУпҫдәНwhileСӯ»·УпҫдөДҪбәПұаіМЈ¬ТтҙЛФЪСөБ·№эіМЦРТ»¶ЁТӘИГС§ЙъЦШөгХЖОХХвБҪЦЦҪб№№өДЗ¶МЧЎЈ
·ҪКҪИ·¶ЁУлКөК©ІЯВФ
ЎЎЎЎИ·¶ЁТЖ¶Ҝ·ҪКҪ
ЎЎЎЎ»ъЖчИЛФЪөШГжЙПТЖ¶ҜөД·ҪКҪНЁіЈУР3ЦЦЈәВЦКҪЎўВДҙшКҪәНІҪРРКҪЎЈІҪРРТЖ¶Ҝ·ҪКҪДЈ·ВИЛАа»т¶ҜОпөДРРЧЯ»ъАнЈ¬УГНИҪЕЧЯВ·Ј¬¶Ф»·ҫіККУҰРФәГЈ¬ЦЗДЬіМ¶ИТІПа¶ФҪПёЯЈ¬ө«І»ККУЪФЪ¶Фҝ№РФёЯөДұИИьЦРЎЈВДҙшКҪКөјККЗТ»ЦЦЧФјәОӘЧФјәЖМВ·өДВЦКҪіөБҫЈ¬ККУГУЪЛЙИнІ»ЖҪөДөШГжЎЈТтҙЛЈ¬ВДҙшКҪ№г·әУГФЪёчАаҪЁЦю»ъРөј°ҫьУГіөБҫЙПЈ¬ТІІ»ККУГФЪұИИьЦРЎЈВЦКҪТЖ¶ҜКЗЧоіЈјыөДТ»ЦЦөШГжРРҪш·ҪКҪЎЈЛьөДУЕөгКЗЈәДЬёЯЛЩОИ¶ЁөШТЖ¶ҜЈ¬ДЬБҝАыУГР§ВКёЯЈ¬»ъ№№әНҝШЦЖјтөҘЈ¬¶шЗТјјКхұИҪПіЙКмЎЈФЪ»ъЖчИЛЧгЗтұИИьЦРЈ¬іЎөШОӘКТДڹ⻬ЖҪХыөШГжЈ¬·ЗіЈККәПВЦКҪФЛ¶ҜЎЈөұҪсУРәЬ¶а»ъЖчИЛЙъІъі§јТФЛУГөД¶јКЗіөВЦ·ҪКҪЎЈіөВЦ°ІЧ°·ҪКҪУР2ЦЦЈ¬3ВЦ»ъЖчИЛіөМеЕдЦГҪб№№ЛдИ»јтөҘЈ¬ө«ОИ¶ЁРФІоЈ¬УцөҪіеЧІИЭТЧЗгө№ЎЈУл3ВЦПаұИЈ¬4ВЦОИ¶ЁРФёьәГЎЈ4ВЦөдРНЕдЦГУРИзПВ2ЦЦЈә
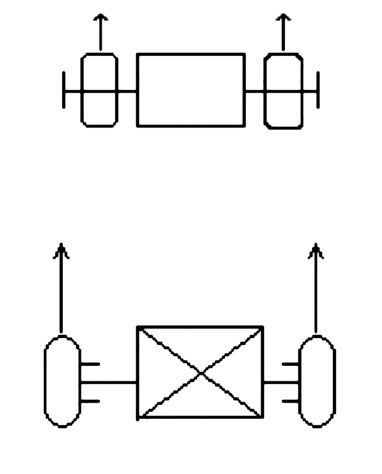
ЈЁНј1 ЛДВЦҪб№№Ј©
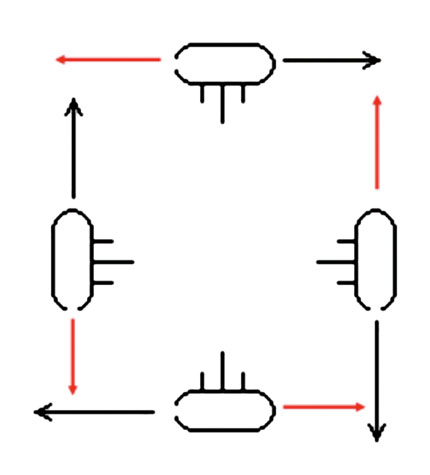
ЈЁНј2 ЛДВЦИ«ПтҪб№№Ј©
ЎЎЎЎНј1КЗ4ВЦҪб№№Ј¬Нј2КЗ4ВЦИ«ПтҪб№№ЎЈЗ°ХЯФЪЧӘПтКұІ»№»Бй»оЈ¬ұИИьЦРІ»ИЭТЧұ»¶Ф·Ҫ»ъЖчИЛЗбТЧөШНЖ¶ҜЈ¬ККәПУЪөзБҝұИҪП¶аЎўөзС№ұИҪПёЯөДұИИьЦРЈ¬ҝЙУГУЪІОјУөзҪМ№Э»ъЖчИЛұИИьЎЈ¶шәуХЯФтПа·ҙЈ¬ФЪҝЖРӯөДұИИьПоДҝЦРЈ¬УЙУЪЦ»УГ6ҪЪёЙөзіШЈ¬өзБҝұИҪПРЎЈ¬ұИИь№эіМЦРіеЧІІ»»бјӨБТЈ¬¶шЗТіЎөШКЗ·ЗіЈ№в»¬өДЕз»жЦҪЈ¬ТтҙЛІЙУГЛДВЦИ«ПтҪб№№ёьјУБй»оР©ЎЈ
ЎЎЎЎСЎФс»ъЖчИЛЕдјю
ЎЎЎЎЎс ВнҙпөДСЎФс
ЎЎЎЎИзҪсКРіЎЙПЦчТӘУРБҪЦЦРНәЕөДВнҙпҝЙУГУЪЧгЗт»ъЖчИЛЈ¬Т»ЦЦКЗЖХНЁВнҙпЈ¬УРІ»Н¬КдИлөзС№ЎўІ»Н¬ЧӘЛЩөДЈ¬ёЯөзС№ёЯЧӘЛЩөДККУГУЪөзҪМ№ЭЧгЗтЈ¬өНөзС№өНЧӘЛЩөДККУГУЪҝЖРӯЧгЗтЎЈБнТ»ЦЦКЗИҘДкІЕНЖіцөДҝХРДұӯВнҙпЈ¬ТӘЗуөзС№ұИҪПөНЈ¬ө«КЗұИН¬СщөзС№өДЖХНЁВнҙпЧӘЛЩЙФёЯЎЈФЪҝЖРӯөДұИИьЦР¶ФөзС№УРПЮЦЖЈ¬Ц»ДЬКЗК№УГ6ҪЪёЙөзіШЈ¬ТтҙЛСЎФсҝХРДұӯөДВнҙпУРТ»¶ЁөДУЕКЖЎЈ
ЎЎЎЎЎс ВЦЧУөДСЎФс
ЎЎЎЎВЦЧУФЪХвАп·ЗіЈ№ШјьЈ¬ТтОӘұИИьіЎөШәܹ⻬Ј¬ЛщТФВЦЧУІ»ДЬМ«№э№в»¬Ј¬·сФт»ъЖчИЛФЪіЎөШЙП»бәЬІ»ОИ¶ЁЈ¬ҝЙДЬұ»¶Ф·ҪЗбТЧөШНЖ¶ҜЎЈЛщТФҝЖРӯұИИьЦРВЦЧУЧоәГСЎФсИнЖӨЗТУРөгОЖВ·өДЎЈ
ЎЎЎЎЎс »Т¶ИәНЗэ¶Ҝ°еөДСЎФс
ЎЎЎЎГҝёц»ъЖчИЛРиТӘ4ёцұИҪПҫ«И·өД»Т¶ИДЈҝйЈ¬СЎФсөДКұәтТ»¶ЁТӘФЪіЎөШЙПТ»ёцёцҪшРРІвКФЈ¬К№ЛьГЗФЪН¬Т»ёцЗшУтөДІвЦөұИҪПҪУҪьЎЈЦ»УРХвСщ»ъЖчИЛІЕДЬҫ«И·өШЗш·ЦіЎөШөД5ёцЗшУтЎЈСЎФсЗэ¶Ҝ°еКұТ»¶ЁТӘәНВнҙпҙоЕдЈ¬ЦчТӘҫНКЗКдИләНКдіцөзС№Т»¶ЁТӘәНВнҙпТ»ЦВЈ¬ІЕДЬҙпөҪЧојСөДР§№ыЎЈ
ЎЎЎЎЎс Цч»ъөДИ·¶Ё
ЎЎЎЎЦч»ъҝЙТФУР¶аЦЦСЎФсЈ¬ө«КЗТ»¶ЁТӘЧсСӯТ»¶ЁөДФӯФтЈ¬јҙҙҰАнЛЩ¶ИҝмЎўәДөзөНЎЈҫНКЗЛөТӘДЬәНЗэ¶Ҝ°еҙоЕдЈ¬ДЬФЪ9VөзС№ПВХэіЈ№ӨЧчЎЈ
ЎЎЎЎЎс ЖдЛыІҝјюөДСЎФс
ЎЎЎЎөзЧУВЮЕМәНәмНвІвҫаТ»°г¶јКЗНЁУГөДЈ¬ТӘЗуТ»¶ЁТӘДЬҫ«И·ІвЦөЎЈ
ЎЎЎЎПВЖЪОДХВҪ«ҪйЙЬКөК©ІЯВФөДөЪИэІҪ——ЧйЧ°өчКФЈ¬ТФј°ИьЗ°СөБ·УлІОИьјјЗЙЎЈЎц



















