ЦРС§Йъ»ъЖчИЛЧгЗт»о¶ҜІЯВФМҪЛчЈЁПВЈ©
ұҫОДЧӘФШЧФЎ¶ЦР№ъҝЖјјҪМУэЎ·ФУЦҫ2012.11ЧЬөЪ200ЖЪ
ЎЎЎЎЧгЗтФЛ¶ҜКЗТ»ЦЦҙујТ·ЗіЈПІ°®өДФЛ¶ҜЎЈИГ»ъЖчИЛИҘМЯЧгЗтЈ¬МэЖрАҙПсМм·ҪТ№М·ЛЖөДЎЈ»ъЖчИЛТІДЬИҘМЯЧгЗт? ¶шЗТЈ¬»№ТӘЧйіЙТ»ёц¶УОйЈ¬І»Н¬өД»ъЖчИЛТӘ»ҘПаЕдәПЈҝЧгЗт»ъЖчИЛТӘІОјУұИИьКЗ·сУРЧФјәөДСЫҫҰЎўЧФјәөДЛ«НИЎўЧФјәөДҙуДФЎўУРЧФјәөДЧмЈҝұҫОДКФНјНЁ№эЧгЗт»ъЖчИЛұИИьөДХыёцЧјұё№эіМөДГиКцАҙҪвҙрХвР©ОКМвЎЈ
ЎЎЎЎЙПЖЪОДХВҪйЙЬБЛИьЗ°СЎ°ОУлЗ°ЖЪСөБ·Ј¬ТФј°КөК©ІЯВФөДЗ°БҪІҪ——И·¶ЁТЖ¶Ҝ·ҪКҪәНСЎФс»ъЖчИЛЕдјюЎЈұҫЖЪОДХВҪ«ҪУЧЕҪйЙЬКөК©ІЯВФөДөЪИэІҪ——ЧйЧ°әНөчКФЎЈ
ЧйЧ°өчКФ
ЎЎЎЎЎс ЧйЧ°
ЎЎЎЎТ»ЦЦКЗЦұҪУ№әВт№«ЛҫөДҪб№№јюЈ¬°ҙХХ№«ЛҫөДҪб№№КҫТвНјРОҙоҪЁ»ъЖчИЛЎЈХвСщҝЙТФҪЪФјәЬ¶аКұјдЈ¬С§ЙъҝЙТФ°СҙуБҝКұјд»ЁФЪ»ъЖчИЛөДөчКФЙПЎЈө«КЗ¶ФУЪіМРтұаРҙУРәЬ¶аПЮЦЖЎЈ»№УРТ»ЦЦКЗЧФјәВтІДБПЈ¬ЧФјәЧцҪб№№°ьЈ¬ө«КЗХвЦЦ·ҪКҪРиТӘС§Йъ¶ҜКЦДЬБҰәНіМРтЙијЖДЬБҰј«ЗҝЈ¬ККәПУЪёЯЦРС§ЙъЎЈХвАпЦ»МёМёҙоҪЁ№эіМЦРРиТӘМШұрЧўТвөДөШ·ҪЎЈУЙУЪ»ъЖчИЛРиТӘҝҝіЎөШЗшУтөД»Т¶ИЦөЎўҪЗ¶Иҙ«ёРЖчәНәмНвҙ«ёРЖчАҙЕР¶П»ъЖчИЛҙҰУЪіЎөШөДҫЯМеО»ЦГЈ¬¶ш»Т¶ИДЈҝйәНәмНвДЈҝйІвЦөИЭТЧКЬөҪНвҪзЧФИ»№в»тЖдЛыТтЛШөДУ°ПмЈ¬ТтҙЛ¶Ф»Т¶ИДЈҝйәНәмНвДЈҝйөД°ІЧ°КЗ·ЗіЈУРҪІҫҝөДЎЈ»Т¶ИДЈҝйұШРлУлөШГжҫЎБҝөШҝҝҪьЈ¬ө«КЗІ»ДЬҪУҙҘЈ¬ХвСщјИҝЙТФК№ІвЦөұИҪПЧјИ·Ј¬УЦҝЙТФұЬГвНвҪз№вПЯөДёЙИЕЎЈәмНвДЈҝй°ІЧ°ёЯ¶ИУҰҫЎБҝұИЗтөДёЯ¶ИёЯТ»өгЈ¬ТтОӘәмНв·ўіцөДәмНвПЯЈ¬Из№ыГ»УРҫӯ№эМШКвөДҙҰАнЈ¬ҝЙДЬУ°ПмЖдЛы»ъЖчИЛөДёҙСЫөД¶БЦөЎЈН¬КұәмНвДЈҝйЗ°ГжІ»ДЬУРЖдЛыОпМеЈЁПЯЎўҪб№№јюөИЈ©ХЪөІЎЈ
ЎЎЎЎЎс өчКФ
ЎЎЎЎ»ъЖчИЛУІјюөчКФ
ЎЎЎЎ»ъЖчИЛЧйЧ°әГЦ®әуЈ¬КЧПИРиТӘ¶Ф»ъЖчИЛөДУІјю°ІЧ°әНҪУПЯҪшРРөчКФЈ¬ҝҙУІјюКЗ·сУР°ІЧ°ҙнОуөДөШ·Ҫ»тҪУПЯКЗ·сУРҪУҙнөДөШ·ҪЎЈЧоЦұҪУөД·Ҫ·ЁҫНКЗёш»ъЖчИЛНЁөзЈ¬ҙ«ИлВнҙпІвКФіМРтЈ¬ҝҙ»ъЖчИЛКЗ·сКЗіҜ¶ЁТеөДЗ°·ҪФЛ¶ҜөДЎЈЖдҙОҝҙёҙСЫЎўәмНвәН»Т¶ИДЈҝйКЗ·с°ІЧ°ХэіЈЎЈҫЯМе·Ҫ·ЁКЗҪ«»ъЖчИЛ·ЕИліЎөШЈ¬ҝҙЦч»ъПФКҫЖБЙПөД»Т¶ИЦөКЗ·сКфУЪХэіЈЛ®ЖҪЎЈИ»әуҪ«КЦҝҝҪьәмНвҙ«ёРЖчЈ¬№ЫІмІвЦөЎЈЧоәу°С»ъЖчИЛЗтҝҝҪьёҙСЫЈ¬№ЫІм¶БЦөЎЈИз№ыХвР©ІвЦө¶јКфУЪХэіЈ·¶О§Ц®ДЪЈ¬ДЗГҙҝЙТФИ·¶Ё»ъЖчИЛУІјю°ІЧ°іЙ№ҰЎЈ
ЎЎЎЎ»ъЖчИЛИнјюөчКФ
ЎЎЎЎ¶Ф»ъЖчИЛөДҝШЦЖөДЛјПлЈ¬КЗЦұҪУНЁ№эИнјюіМРтұнҙпөДЎЈТтҙЛЈ¬ИнјюЙијЖКЗХыёцЙијЖ№эіМЦРЧоЦШТӘөДІҝ·ЦЦ®Т»Ј¬ЦұҪУ№ШПөөҪ»ъЖчИЛФЪИьіЎЙПөДұнПЦЎЈУЙУЪіМРтДЈҝйұИҪПёҙФУЈ¬ФЪҙЛІ»ҫЯМеРҙіцЈ¬Ц»¶ФТ»Р©іМРтЛјПлЧчјтөҘГиКцЎЈ¶ФұИИь№эіМөД№жФтҪшРР·ЦОцәу·ўПЦЈ¬ұИИьөДҪшРРУлХжКөөДЧгЗтұИИьөДЛјО¬№эіМКЗТ»ЦВөДЈ¬»ъЖчИЛРиТӘНкіЙПВКц¶ҜЧчСӯ»·Јә

ЈЁНј1 ЧгЗт»ъЖчИЛРиТӘНкіЙөД¶ҜЧчСӯ»·Ј©
ЎЎЎЎИ»¶шФЪХвТ»№эіМЦРЈ¬Чо№ШјьөДТ»ІҪКЗ°СЗт№ҘҪшХэИ·өДЗтГЕЎЈЖдДСөгФЪУЪХТЗтөДҙ«ёРЖчУлөШГж·ҪПтөДҙ«ёРЖчКЗПа»Ҙ¶АБўөДБҪМЧПөНіЈ¬ФхСщІЕДЬИГ»ъЖчИЛЕР¶ПөұЗ°ЧҙМ¬КЗХТЗт№эіМ»№КЗҙшЗтҪш№Ҙ№эіМ·ЗіЈЦШТӘЎЈИз№ыөҘ¶АЦҙРРХТЗтіМРтЈ¬ИГ»ъЖчИЛёъЛжЗтөД·ҪПтЗ°ҪшЈ¬ХвСщ»ъЖчИЛ»бәЬДСҪ«ЗтХэИ·өШіеПт¶Ф·ҪЗтГЕЈ¬»№әЬУРҝЙДЬ°СЗтЧІИлЧФјәөДЗтГЕЈ»Из№ыөҘ¶АЦҙРР·ҪПтЕР¶ПіМРтЈ¬»ъЖчИЛФтОЮ·ЁЦӘөАөұЗ°ЗтөДО»ЦГЈ¬УРҝЙДЬФЪГ»УРҝШЗтөДЗйҝцПВіеПт¶Ф·ҪЗтГЕ¶шФміЙОЮР§өДҪш№ҘЎЈФхСщҪвҫцХТЗтіМРтәНҪш№Ҙ·ҪПтЕР¶ПіМРтөДПОҪУЈ¬ұЬГвОЪБъЗтәНОЮР§өДҪш№ҘЈ¬ХвРиТӘФЪЛг·ЁЙијЖЦРОӘХТЗтәНҪш№ҘҪшРРПа»ҘЕдәПІЕДЬҪвҫцЎЈ
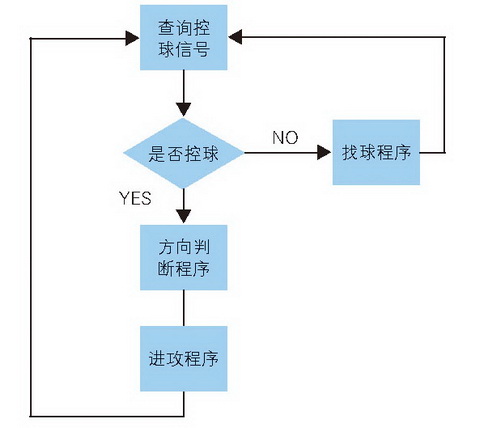
ЈЁНј2ЧгЗт»ъЖчИЛХТЗтҪш№ҘБчіМНјЈ©
ЎЎЎЎҪш№Ҙ·ҪПтөДЕР¶ПКЗёщҫЭөШГж»Т¶ИөДФцјхұИҪПАҙҪшРРөДЎЈФЪҪУҪь°ЧЙ«өДЗшУтЈ¬¶ФәмНв№вөД·ҙЙдБҝҙ󣬹вөзЕР¶БЖчјҙ»Т¶Иҙ«ёРЖчөДКдіцөзС№ёЯЈ»ФЪҪУҪьәЪЙ«ЗшУтЈ¬КдіцөзС№ФтөНЎЈФЪҙЛЈ¬Д¬ИПҙУ°ЧөҪәЪОӘҪш№Ҙ·ҪПтҪшРРұаіМЎЈ
ЎЎЎЎөұ»ъЖчИЛөДЗ°ГжёҙСЫХТөҪЗтІўіЦЗтКұЈ¬»ъЖчИЛКЧПИЕР¶ПЗ°ҪшөД·ҪПтКЗ·сКЗҪш№ҘөД·ҪПтЈ¬Ц®әуЈ¬ФЩЕР¶ПЗ°ҪшөД·ҪПтКЗ·сЖҪРРУЪұЯПЯХэ¶ФЗтГЕЎЈИз№ыКЗЈ¬ЦұҪУіЦЗт№ҘГЕЈ»Из№ыІ»КЗҪш№Ҙ¶Ф·ҪЗтГЕ·ҪПт»тЗ°Ҫш·ҪПтІ»ЖҪРРұЯПЯХэ¶ФЗтГЕЈ¬»ъЖчИЛФтРиТӘПИөчХыҪЗ¶ИЈ¬И»әуСЎФс№ҘГЕЎЈХвСщЧцҝЙТФҙуҙуМбёЯҪшЗтөДР§ВКЎЈ
ЎЎЎЎөұ»ъЖчИЛөДәуГжёҙСЫХТөҪЗтөДКұәтЈ¬»ъЖчИЛІ»ДЬЦұҪУИҘіЦЗтЈ¬Из№ыЦұҪУіеҪьИҘіЦЗтөД»°Ј¬УРҝЙДЬФміЙОЪБъЗтЎЈДЗХвСщҫНТӘЗуОТГЗ»ъЖчИЛУҰёГИЖ№эЗтЈ¬ИГ»ъЖчИЛөДЗ°ёҙСЫИҘҝҙөҪЗтЈ¬ІўК№іМРтСӯ»·өҪЗ°ёҙСЫХТЗт—іЦЗтөД№эіМЎЈ
ЎЎЎЎФЪҙу·ҪПтөчХэЦ®әуЈ¬РиТӘөчХы»ъЖчИЛөДЗ°ҪшҪЗ¶ИЈ¬јҙК№З°Ҫш·ҪПтЖҪРРУЪұЯПЯЈ¬Хэ¶ФЗтГЕЎЈХвёц¶ҜЧчКЗНЁ№эЧуУТБҪёц»Т¶Иҙ«ёРЖчЧӘ»»Ҫб№ыЦ®јдөДұИҪПАҙНкіЙөДЎЈПИ¶БИЎөұЗ°»Т¶ИЦөЈ¬ФЩҪшРРЧуУТБҪёцҪб№ыөДұИҪПЈ¬Из№ыЧу»Т¶ИҙуУЪУТ»Т¶ИЈ¬ЛөГчЗ°Ҫш·ҪПтЖ«ЧуЈ¬өчУГФӯөШЧӘ¶ҜіМРтПтУТЖ«ЧӘЈ¬өчХыәуЈ¬ФЩҙО¶БИЎЈ¬ұИҪПЈ¬ЦұөҪЧуУТПаөИОӘЦ№Ј¬ХвКұ·ҪПтХэ¶ФЗтГЕЈ¬өчУГіӨҫаАлЦұРРіМРтЈ¬ҝӘКјҪш№ҘЈ¬°СЗт№ҘИлЗтГЕЎЈ
ЎЎЎЎФЪ¶ФБҪёц»Т¶ИЦөҙуРЎҪшРРұИҪПКұЈ¬УләмНвҙ«ёРЖчУРАаЛЖөДОКМвРиТӘЧўТвЈәПајхіцПЦёәКэКұРиТӘөчХыОӘПа·ҙКэЈ»ЕР¶ППаөИКұУРҙ«ёРЖчОуІоҙжФЪЈ¬РиТӘЙи¶ЁгРЦөЈ¬ІоЦөРЎУЪгРЦөјҙИПОӘПаөИЎЈ
ИьЗ°СөБ·УлІОИьјјЗЙ
ЎЎЎЎИьЗ°СөБ·
ЎЎЎЎІОИьЦ®З°ЕаСөС§ЙъКЗ·ЗіЈ№ШјьөДЈ¬іхЦРЎўРЎС§өДС§ЙъЈ¬УЙУЪДкБдөДФӯТтЈ¬ҝЙДЬУРәЬ¶аЧўТвКВПоІ»ИЭТЧјЗЧЎЈ¬јУЙПФЪұИИь№эіМЦРҪфХЕЈ¬ёьјУИЭТЧНьјЗЈ¬ДЗОЁТ»өД·Ҫ·ЁҫНКЗФЪИьЗ°¶аЕаСөЈ¬¶аЗҝөчЈ¬ИГЛыГЗ¶ФұИИьөДЧўТвКВПојУЙоУЎПуЎЈҫЯМеөД·Ҫ·ЁҫНКЗЈ¬ИГС§ЙъФЪСөБ·іЎөШЙП¶аҙОҪшРРДЈДвұИИьЈ¬ІўЗТЦёөјҪМКҰТӘСПёс°ҙХХұИИь№жФтҪшРРЦҙІГЎЈГҝТ»ҙОұИИьЦ®әу¶јИГС§ЙъҪшРРјтөҘРЎҪбЈ¬Іў°СРиТӘЧўТвөД№ШјьөШ·ҪәН¶УФұҪшРРҪ»БчЎЈҫӯ№э¶аҙОСөБ·Ц®әуЈ¬С§ЙъҝЙТФ·ЗіЈКмБ·өШҪшРРіЎөШөчКФЈ¬ҙУ¶шҝЙТФРШУРіЙЦсөШІОјУұИИьЎЈ
ЎЎЎЎІОИьјјЗЙ
ЎЎЎЎУРКұәтұИИьІЯВФөДәГ»өЦұҪУҫц¶ЁұИИьөДКӨёәЎЈұИИзұИИь№эіМЦРЈ¬Т»°гКЗІ»ФКРнАлҝӘИьіЎөДЈ¬ЛщТФҫНұШРл°СО¬РЮұёјюәНұКјЗұҫ¶јҙшөҪИьМЁҙҰЈ¬іцПЦТвНвЗйҝцөДКұәтІЕДЬј°КұҙҰАнЎЈ»№УРұИИь№эіМЦРТӘЛжКұ№ШЧўЧФјәөД»ъЖчИЛЈ¬ҝҙөҪФЛРРЧҙМ¬ёъФӨ¶ЁіМРтІ»Т»ЦВЈ¬ҫНТӘҫЎҝмХТ»ъ»бјмІй»ъЖчИЛЈ¬УРКұәтҫНКЗПЯВ·өДЛЙ¶ҜөјЦВ»ъЖчИЛФЛРРІ»ХэіЈЈ¬НЁ№эјтөҘөДҙҰАнҫНДЬВнЙП»ЦёҙЧҙМ¬ЎЈБнНвҝЖРӯөДЧгЗтұИИьФЛУГөДКЗ6ҪЪ5әЕёЙөзіШЈ¬¶ФУЪҪш№Ҙ»ъЖчИЛЈ¬Т»°гЗйҝцПВЙП°ліЎұгУГөфБЛҙуІҝ·ЦөДөзБҝЈ¬ПВ°ліЎБҰБҝ»бұдөГәЬИхЎЈө«КЗЈ¬·АКШ»ъЖчИЛҫНФЪҪыЗшДЪІҝ·АКШЈ¬ФЛ¶ҜБҝРЎЈ¬ПыәДөзБҝПа¶ФҪПЙЩЎЈЛщТФИз№ыЙП°ліЎКдөфЗт»тКЗЛ«·Ҫ¶јГ»УРҪшЗтЈ¬ДЗГҙПВ°ліЎЧоәГёь»»өзіШЈЁөұИ»№жФтІ»ФКРнөД»°ҫНІ»ДЬёь»»Ј©ЎЈИз№ыЙП°ліЎУ®ЗтЈ¬ДЗГҙПВ°ліЎөД№ШјьҫНКЗ·АКШЎЈЦ»ТӘ·АКШЧЎ¶Ф·ҪҪш№ҘЈ¬І»ИГҪшЗтЈ¬ДЗХвіЎұИИьҫНУ®¶ЁБЛЎЈХвР©»щұҫөДұИИьІЯВФФЪЕаСө№эіМЦР¶јТӘ¶ФС§ЙъҪшРРСөБ·ЎЈ
ҪбКшУп
ЎЎЎЎЛжЧЕ°ьАЁРЕПўјјКхФЪДЪөДҝЖС§јјКхөДёЯЛЩ·ўХ№Ј¬ТФЗ°өДҪМУэДЈКҪПВЕаСшөДС§ЙъТСҫӯІ»ДЬККУҰЙз»б·ўХ№өДРиЗуЈ¬ХвҫНТӘЗуѧУҝӘЙиТ»Р©ЖдЛыҝОіМАҙІ№ідҪМС§Ј¬ЖдЦР»ъЖчИЛҝОіМҪМС§УҰёГКЗТ»ЦЦұИҪПәГөДёЁЦъҝОіМЎЈ»ъЖчИЛҝОіМҪМС§ТФС§Йъ¶ҜДФС§П°РВЦӘЎў¶ҜКЦІЩЧчКөјщОӘЦчЈ¬ТФҪМКҰТэөјәН·юОсОӘёЁЎЈНЁ№э»ъЖчИЛөДҪМС§Ј¬С§ЙъҝЙТФФЪС§П°№эіМЦРІ»¶П»сИЎҫӯСйЈ¬ёДұдЛјО¬·ҪКҪЈ¬С§»бУлЖдЛыИЛәПЧчЈ¬С§»бУлИЛ·ЦПнЈ¬ҙУ¶шИ«ГжМбёЯС§ЙъөДПЦҙъЙз»бЛШСшЈ¬ОӘККУҰҪсәуөД·ўХ№ҙтПВБјәГөД»щҙЎЎЈЎц



















